Autonomous Surface Vehicle with DAQ
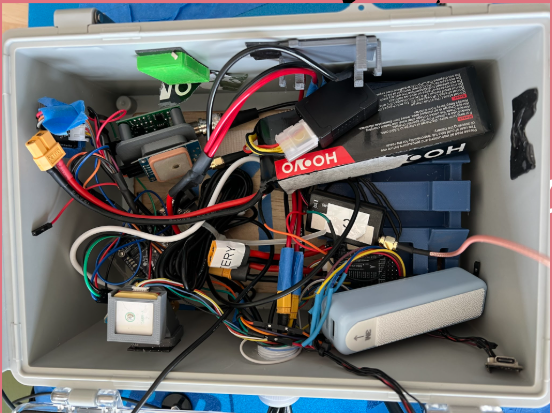
The project developed an autonomous surface vehicle (ASV) to survey water health by collecting real-time temperature, pH, and redox potential data, transmitting telemetry to a base station for storage and analysis. The ASV integrates GPS, telemetry radios, and a Metro M4 microcontroller, enabling autonomous waypoint navigation and environmental mapping.
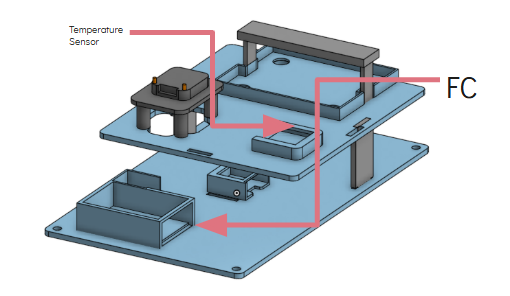
Baseplate I designed to house all electronics for the USV
Full research poster outlining our COSMOS ASV project
🔧 Highlights
• Real-time telemetry to base station;
• Integrated Metro M4, GPS, pH, temperature, redox sensors;
• Autonomous waypoint navigation and environmental mapping.
My Commitments
• Designed CAD mounts and streamlined electronics packaging;
• Focused on reproducible data collection and database logging;
• Prioritized ease-of-debugging and modular sensor integration.
Collaborators
- David Leschensky — Team Member
- Caitlin Lien — Team Member
- Mariia Maliar — Team Member
- Dr. Silberman — Professor Advisor
- Mike Trichtler — Mentor